Esercitazione di laboratorio #2 - Controlli Automatici
Simulazione di sistemi dinamici LTI e studio della stabilita'
Autori: M. Indri, M. Taragna (ultima modifica: 22/04/2020)
Contents
Introduzione
Si puo' suddividere il programma in diverse sezioni di codice usando i caratteri "%%". Ogni sezione puo' essere eseguita separatamente dalle altre con il comando "Run Section" (nella toolbar dell'Editor, subito a destra del tasto "Run"). Si puo' ottenere lo stesso risultato selezionando la porzione di codice che si vuole eseguire e premendo il tasto funzione F9, risparmiando cosi' tempo rispetto all'esecuzione di tutto il programma. Si prenda questo script come esempio di riferimento.
clear all, close all, clc
Stabilita' interna di sistemi dinamici LTI a tempo continuo
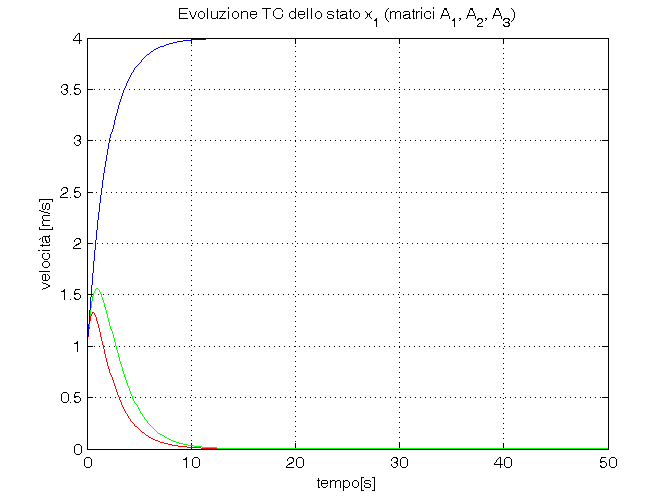
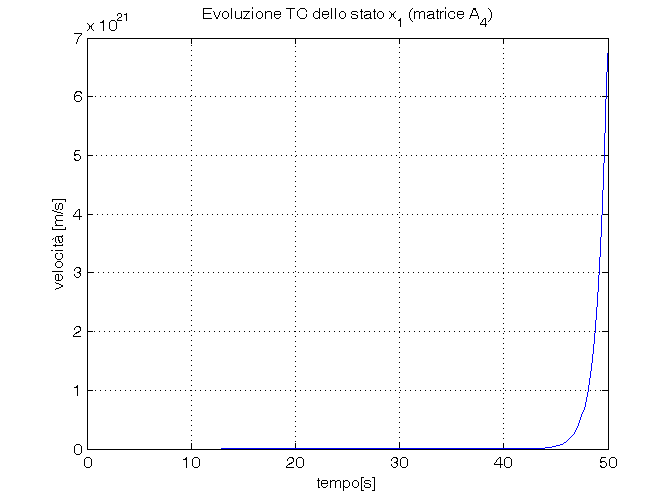
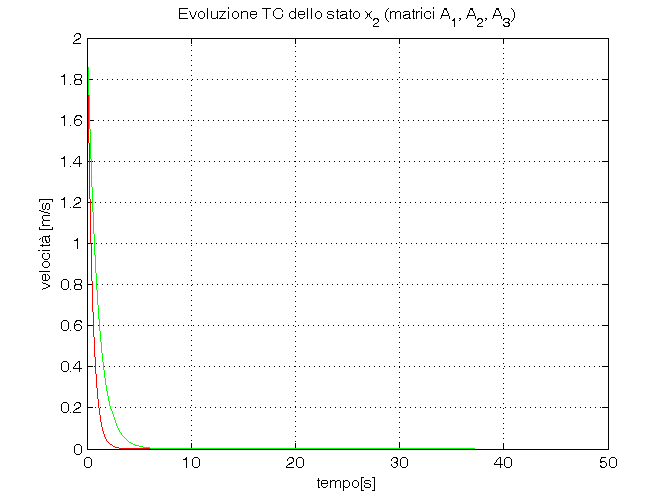
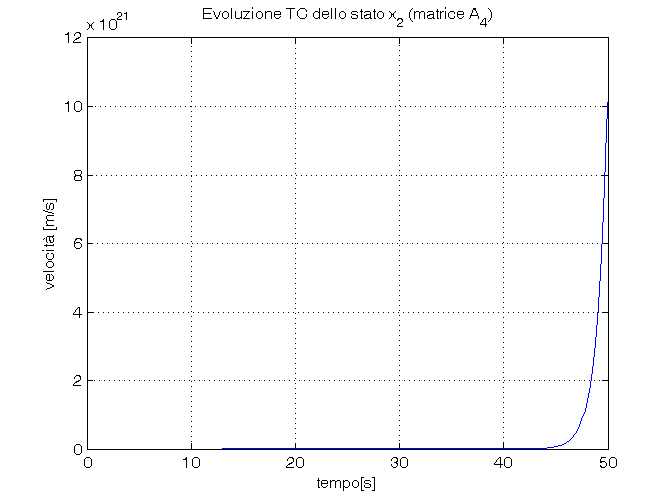
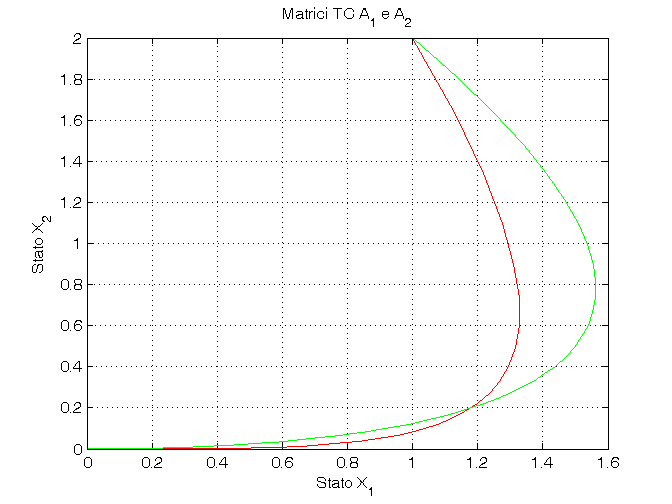
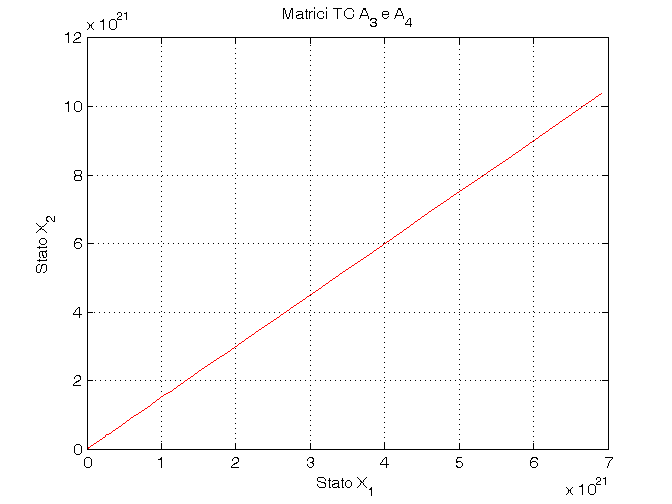
B = [1; 1]; C = [1, 3]; D = [1]; x0 = [1; 2]; A1 = [-0.5, 1; 0, -2]; A2 = [-0.5, 1; 0, -1]; A3 = [-0.5, 1; 0, 0]; A4 = [-0.5, 1; 0, 1]; T = 0:0.1:50; U = (0*T); % ingresso nullo SYS1 = ss(A1,B,C,D); [YS1,TS1,XS1] = lsim(SYS1,U,T,x0); SYS2 = ss(A2,B,C,D); [YS2,TS2,XS2] = lsim(SYS2,U,T,x0); SYS3 = ss(A3,B,C,D); [YS3,TS3,XS3] = lsim(SYS3,U,T,x0); SYS4 = ss(A4,B,C,D); [YS4,TS4,XS4] = lsim(SYS4,U,T,x0); % Evoluzione dello stato X1 figure, plot(TS1,XS1(:,1),'r', TS2,XS2(:,1),'g', TS3,XS3(:,1),' b'),grid on, title('Evoluzione TC dello stato x_1 (matrici A_1, A_2, A_3)'); xlabel('tempo[s]'), ylabel('velocità [m/s]'), figure, plot(TS4,XS4(:,1),'b'), grid on, zoom on, title('Evoluzione TC dello stato x_1 (matrice A_4)'), xlabel('tempo[s]'), ylabel('velocità [m/s]'), % Evoluzione dello stato X2 figure, plot(TS1,XS1(:,2),'r', TS2,XS2(:,2),'g', TS3,XS3(:,2),' b'),grid on, title('Evoluzione TC dello stato x_2 (matrici A_1, A_2, A_3)'); xlabel('tempo[s]'), ylabel('velocità [m/s]'), figure, plot(TS4,XS4(:,2),'b'), grid on, zoom on, title('Evoluzione TC dello stato x_2 (matrice A_4)'), xlabel('tempo[s]'), ylabel('velocità [m/s]'), % Proiezione di X2 e X1 figure, plot(XS1(:,1),XS1(:,2),'r', XS2(:,1),XS2(:,2),'g'),grid on, title ('Matrici TC A_1 e A_2'), xlabel ('Stato X_1'), ylabel ('Stato X_2'), figure, plot (XS3(:,1),XS3(:,2),'b',XS4(:,1),XS4(:,2),'r') ,grid on, title('Matrici TC A_3 e A_4'), xlabel ('Stato X_1'), ylabel ('Stato X_2'), pause
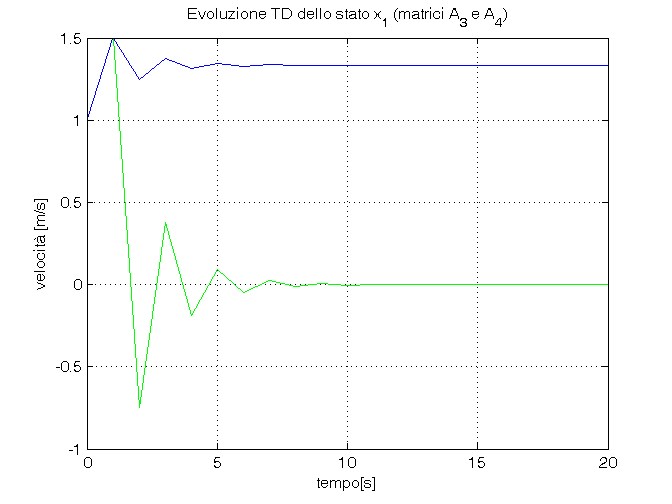
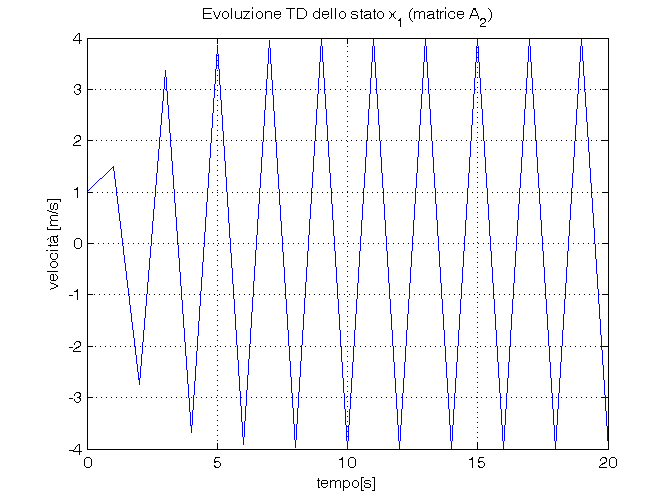
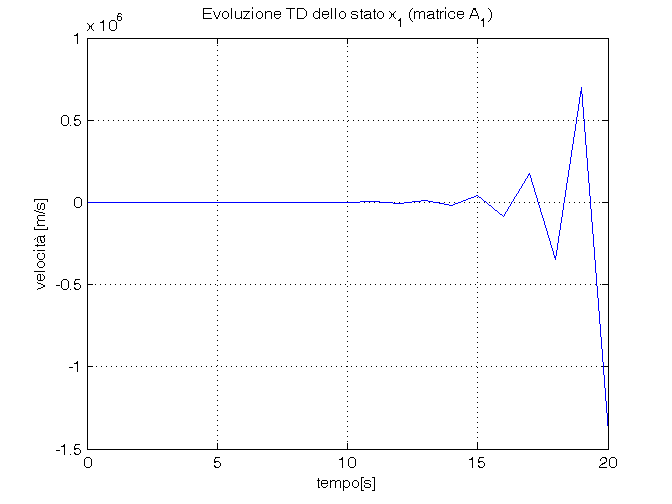
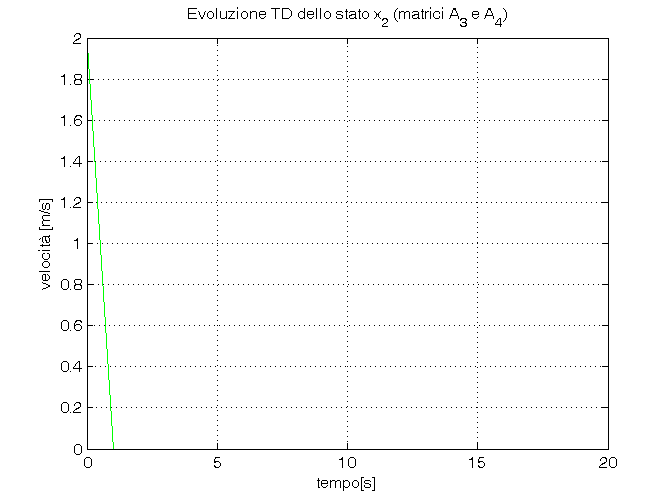
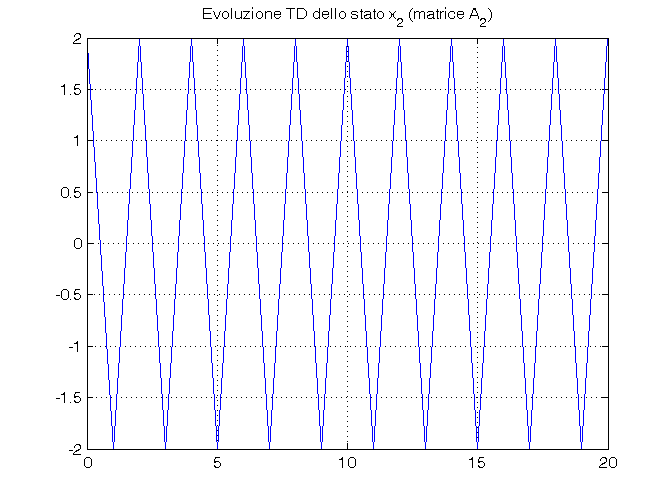
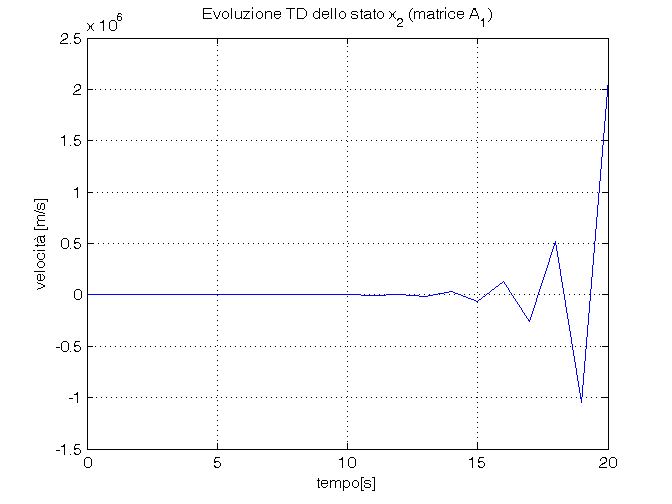
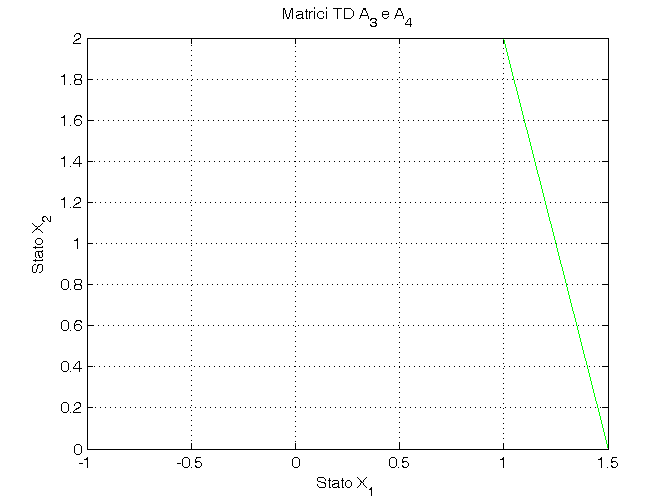
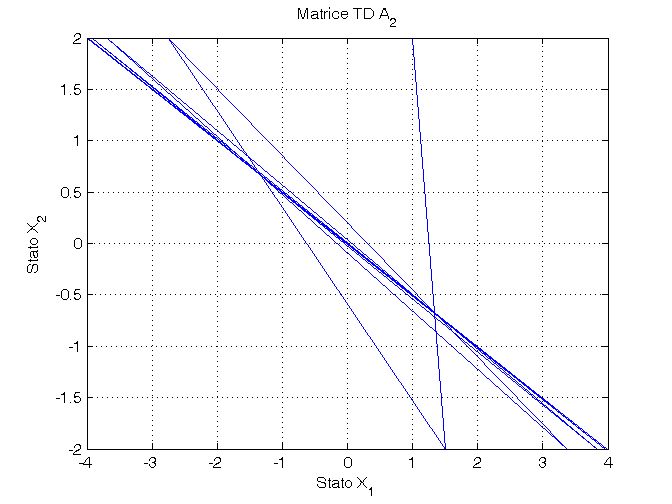
Stabilita' interna di sistemi dinamici LTI a tempo discreto
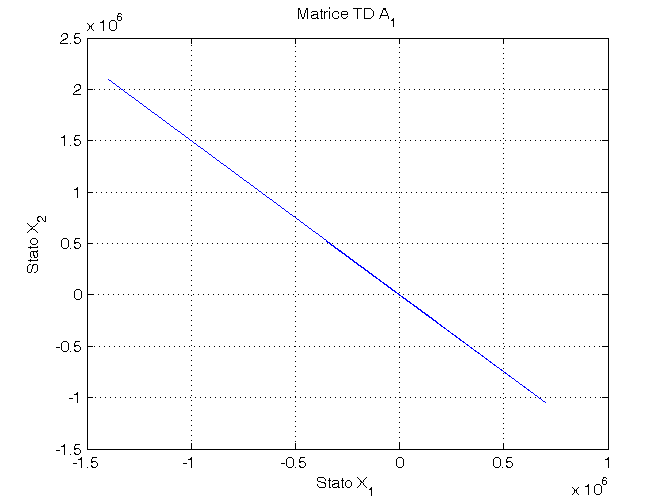
B = [1; 1]; C = [1, 3]; D = [1]; x0 = [1; 2]; A1 = [-0.5 1 ; 0 -2]; A2 = [-0.5 1 ; 0 -1]; A3 = [-0.5 1 ; 0 0]; A4 = [-0.5 1 ; 0 1]; T = 0:1:20; U = (0*T); % ingresso nullo SYS1 = ss(A1,B,C,D,-1); [YS1,TS1,XS1] = lsim(SYS1,U,T,x0) ; SYS2 = ss(A2,B,C,D,-1); [YS2,TS2,XS2] = lsim(SYS2,U,T,x0); SYS3 = ss(A3,B,C,D,-1); [YS3,TS3,XS3] = lsim(SYS3,U,T,x0); SYS4 = ss(A4,B,C,D,-1); [YS4,TS4,XS4] = lsim(SYS4,U,T,x0); % Evoluzione dello stato X1 figure, plot(TS3,XS3(:,1),'g',TS4,XS4(:,1),' b'),grid on, title('Evoluzione TD dello stato x_1 (matrici A_3 e A_4)'); xlabel('tempo[s]'), ylabel('velocità [m/s]'), figure, plot(TS2,XS2(:,1),'b'),grid on, title('Evoluzione TD dello stato x_1 (matrice A_2)'); xlabel('tempo[s]'), ylabel('velocità [m/s]'), figure, plot(TS1,XS1(:,1),'b'), grid on, zoom on, title('Evoluzione TD dello stato x_1 (matrice A_1)'), xlabel('tempo[s]'), ylabel('velocità [m/s]'), % Evoluzione dello stato X2 figure, plot(TS3,XS3(:,2),'g',TS4,XS4(:,2)),grid on, title('Evoluzione TD dello stato x_2 (matrici A_3 e A_4)'); xlabel('tempo[s]'), ylabel('velocità [m/s]'), figure, plot(TS2,XS2(:,2),'b'),grid on, title('Evoluzione TD dello stato x_2 (matrice A_2)'); figure, plot(TS1,XS1(:,2),'b'), grid on, zoom on, title('Evoluzione TD dello stato x_2 (matrice A_1)'), xlabel('tempo[s]'), ylabel('velocità [m/s]'), % Proiezione di X2 su X1 figure, plot(XS4(:,1),XS4(:,2),'r',XS3(:,1),XS3(:,2),'g'), grid on, title ('Matrici TD A_3 e A_4'), xlabel ('Stato X_1'), ylabel ('Stato X_2'), figure, plot (XS2(:,1),XS2(:,2),'b'), grid on , title('Matrice TD A_2'), xlabel ('Stato X_1'), ylabel ('Stato X_2'), figure, plot (XS1(:,1),XS1(:,2),'b'), grid on , title('Matrice TD A_1'), xlabel ('Stato X_1'), ylabel ('Stato X_2'),