Esercitazione di laboratorio #7 - Controlli Automatici
Esercizio #1
Autori: M. Indri, M. Taragna (ultima modifica: 28/05/2020)
Contents
- Comandi di pulizia iniziali
- Definizione del sistema e calcolo del guadagno stazionario
- Analisi delle specifiche
- Funzione d'anello di partenza e valutazione azioni da intraprendere
- Progetto delle reti di compensazione
- Verifica del soddisfacimento dei requisiti su Ga e definizione del controllore
- Verifica delle specifiche in catena chiusa
- Valutazione delle prestazioni in catena chiusa
- Nota finale
Comandi di pulizia iniziali
clear all, close all
Definizione del sistema e calcolo del guadagno stazionario
s=tf('s');
F=13.5*(s+4)*(s+10)/(s+3)^3;
KF=dcgain(F)
Kr=1;
KF =
20
Analisi delle specifiche
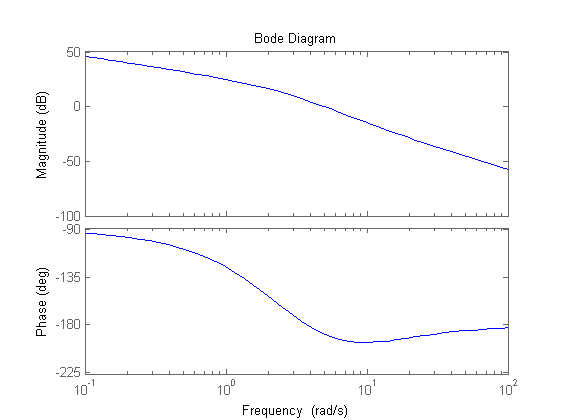
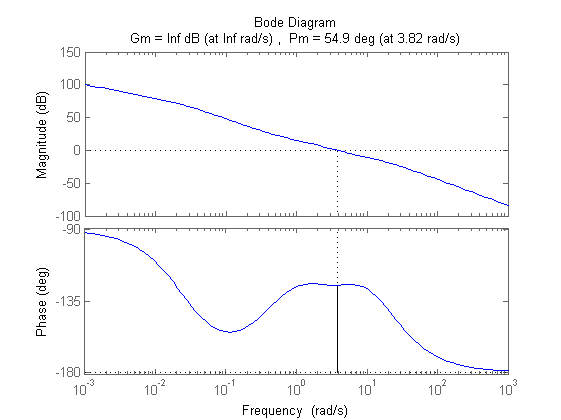
% specifica a) => % 1) C(s) con 1 polo nell'origine, % 2) |Kr/KGa| <= 0.01 => |Kc| >= 100*Kr^2/|KF| => |Kc| >= 5 % specifica b) e' soddisfatta se C(s) ha 1 polo nell'origine % segno di Kc positivo: il sistema è a stabilità regolare bode(F/s) % specifica c) => wc < B3 < 2*wc => wc ~= 0.63 * B3 wc_des=3.8 % specifica d) => (su Nichols) margine_di_fase >= 45deg => meglio ~50deg
wc_des =
3.8000
Funzione d'anello di partenza e valutazione azioni da intraprendere
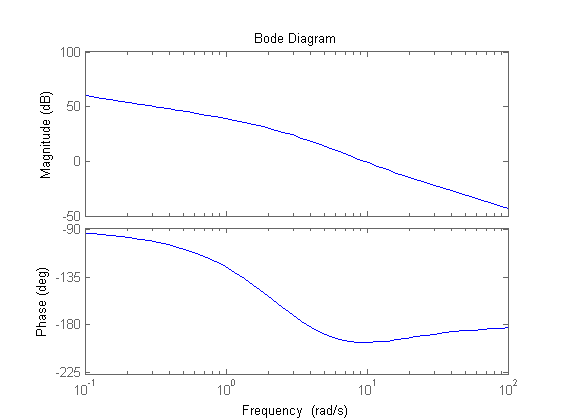
Kc=5 % minimo valore ammissibile Ga1=(Kc/s)*F/Kr figure, bode(Ga1) [m_wc_des,f_wc_des]=bode(Ga1,wc_des) % In wc_des il modulo vale circa 19.3 dB e la fase -180.8 deg % Risulta necessario recuperare circa 60 deg prevedendo di dover inserire % anche una rete attenuatrice per ridurre il modulo. % Il recupero della fase sarà ottenuto usando due reti derivative. % Si consiglia di provare a risolvere l'esercizio anche utilizzando uno zero % reale negativo (fisicamente realizzabile insieme al polo già inserito % nell'origine) al posto delle reti derivative.
Kc =
5
Ga1 =
67.5 s^2 + 945 s + 2700
---------------------------
s^4 + 9 s^3 + 27 s^2 + 27 s
Continuous-time transfer function.
m_wc_des =
9.2384
f_wc_des =
-180.7915
Progetto delle reti di compensazione
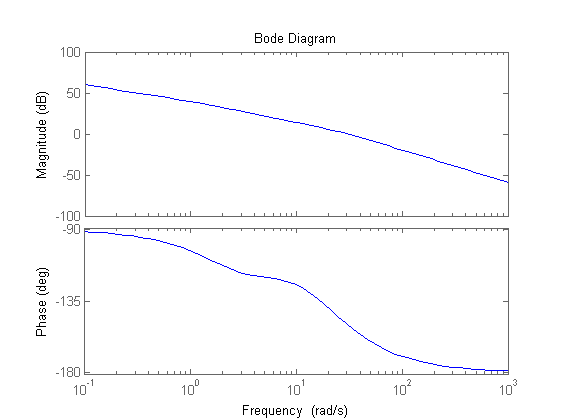
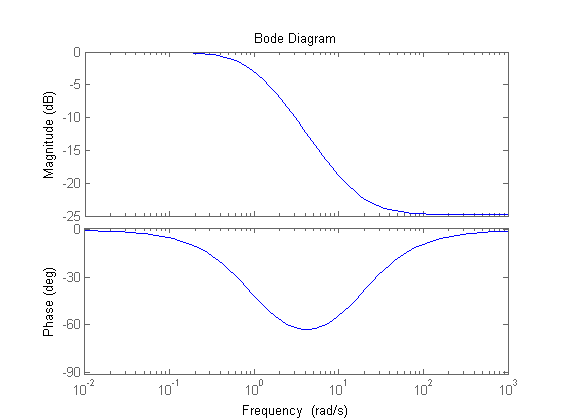
% Inserimento di due reti derivative uguali da 4 per recuperare 60deg in w=wc_des, % progettate sul fronte di salita del recupero di fase in xd = 1 per limitare l'aumento di modulo % ed evitare la successiva necessità di una rete attenuatrice molto forte m_a=4 xd=1 tau_a=xd/wc_des Rd=(1+tau_a*s)/(1+tau_a/m_a*s) [m1_wc_des,f1_wc_des]=bode(Rd^2*Ga1,wc_des) figure, bode(Rd^2*Ga1) % Inserimento di una rete integrativa con m_i=m1_wc_des ~= 17.4 per avere wc_finale=wc_des % e progettata in xi=150 per perdere meno di 10 gradi di fase in w=wc_des % (vedere i diagrammi di Bode normalizzati della rete tracciati in Matlab) m_i=17.4 figure,bode((1+s/m_i)/(1+s)) xi=150 tau_i=xi/wc_des Ri=(1+tau_i/m_i*s)/(1+tau_i*s)
m_a =
4
xd =
1
tau_a =
0.2632
Rd =
0.2632 s + 1
-------------
0.06579 s + 1
Continuous-time transfer function.
m1_wc_des =
17.3899
f1_wc_des =
-118.8640
m_i =
17.4000
xi =
150
tau_i =
39.4737
Ri =
2.269 s + 1
-----------
39.47 s + 1
Continuous-time transfer function.
Verifica del soddisfacimento dei requisiti su Ga e definizione del controllore
figure, margin(Rd^2*Ri*Ga1) C=Kc/s*Rd^2*Ri Ga=C*F/Kr;
C = 0.7855 s^3 + 6.316 s^2 + 13.97 s + 5 -------------------------------------- 0.1709 s^4 + 5.198 s^3 + 39.61 s^2 + s Continuous-time transfer function.
Verifica delle specifiche in catena chiusa
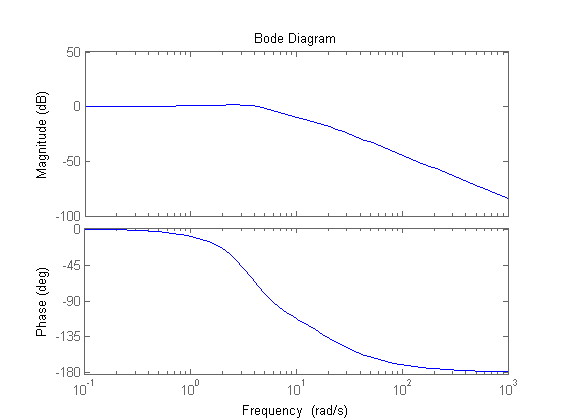
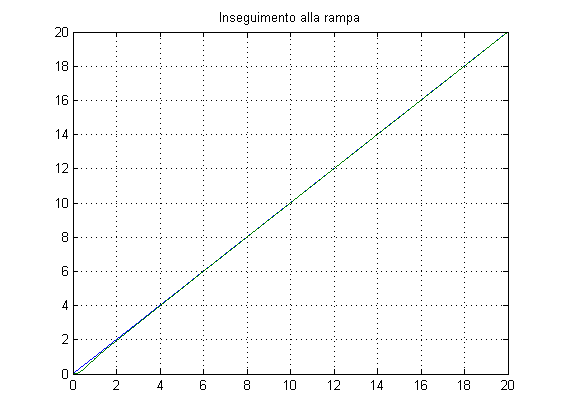
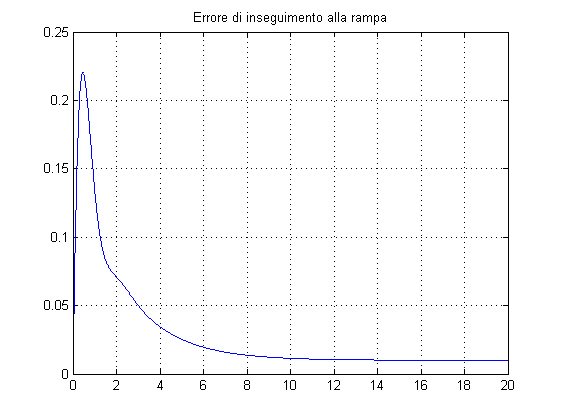
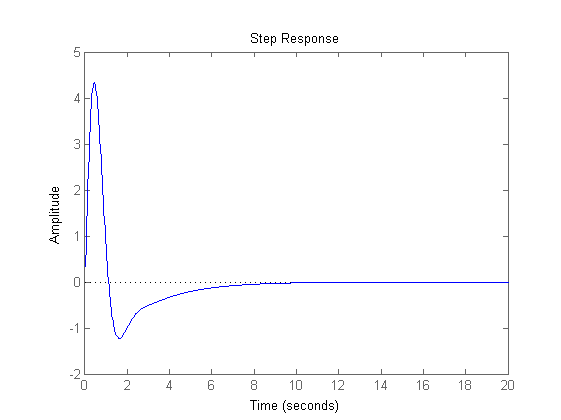
% Verifica della banda passante e del picco di risonanza % (si ottiene wB = 5.7 rad/s, Mr = 1.7 dB <2 dB) W=feedback(C*F,1/Kr); figure, bode(W) % Verifica dell'errore di inseguimento alla rampa % (si ottiene errore = 0.01 in regime permanente) t=0:0.01:20; r=t'; y_rampa=lsim(W,r,t); figure, plot(t,r,t,y_rampa), title('Inseguimento alla rampa'), grid on figure, plot(t,Kr*r-y_rampa), title('Errore di inseguimento alla rampa'), grid on % Verifica dell'effetto (nullo) del disturbo (astaticità) Wd=feedback(F,1/Kr*C); figure, step(Wd,20)
Valutazione delle prestazioni in catena chiusa
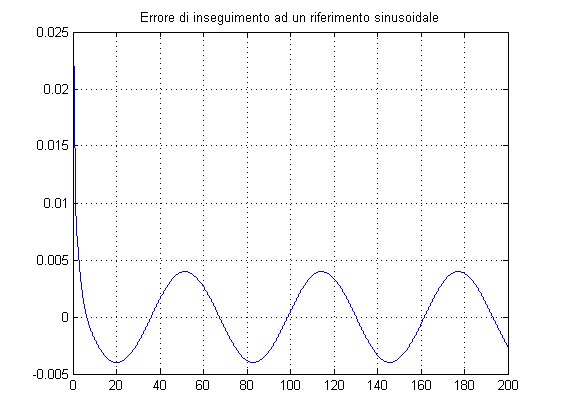
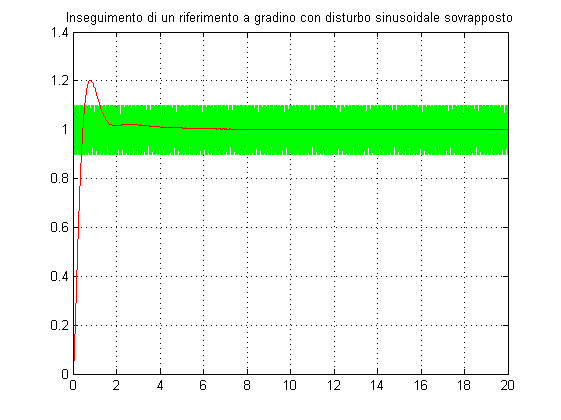
% Calcolo dell'errore di inseguimento in regime permanente % a riferimento sinusoidale sin(0.1*t) w_r=0.1; Sens=feedback(1,Ga); errore_sin=bode(Sens,w_r)*Kr % Verifica dell'errore di inseguimento in regime permanente % a riferimento sinusoidale sin(0.1*t) t=0:0.01:200; r=sin(w_r*t)'; y=lsim(W,r,t); figure, plot(t,r,t,y,'--'), title('Inseguimento ad un riferimento sinusoidale'), grid on figure, plot(t,Kr*r-y), title('Errore di inseguimento ad un riferimento sinusoidale'), grid on % Attenuazione di disturbi sinusoidali entranti sul riferimento, % aventi pulsazione=100rad/s w_disturbi_r=100; attenuazione_disturbi_r=bode(W,w_disturbi_r) % Verifica dell'attenuazione di disturbi sinusoidali entranti insieme % al riferimento a gradino unitario, nel caso che tali disturbi abbiano % ampiezza=0.1, pulsazione=100rad/s % Nel grafico: in rosso la rispotsa del sistema, in verde il riferimento a % soggetto al disturbo t=0:0.001:20; r_disturbato=ones(size(t))+0.1*sin(w_disturbi_r*t); y_r_disturbato=lsim(W,r_disturbato,t); figure, plot(t,r_disturbato,'g',t,y_r_disturbato,'r'), grid on, title('Inseguimento di un riferimento a gradino con disturbo sinusoidale sovrapposto')
errore_sin =
0.0040
attenuazione_disturbi_r =
0.0061

Nota finale
% In questa soluzione proposta tutte le simulazioni sono state eseguite % utilizzando soltanto Matlab al fine di avere un unico file comprensivo di tutte le parti. % Gli studenti sono invitati a costruire il corrispondente schema Simulink % ed a svolgere con esso le verifiche delle specifiche e le valutazioni % richieste in catena chiusa.