Esercitazione di laboratorio #7 - Controlli Automatici
Esercizio #2
Autori: M. Indri, M. Taragna (ultima modifica: 28/05/2020)
Contents
- Comandi di pulizia iniziali
- Definizione del sistema e calcolo del guadagno stazionario
- Analisi delle specifiche
- Funzione d'anello di partenza e valutazione azioni da intraprendere
- Progetto delle reti di compensazione
- Verifica del soddisfacimento dei requisiti su Ga e definizione del controllore
- Verifica delle specifiche in catena chiusa
- Valutazione delle prestazioni in catena chiusa
- Confronto con una soluzione alternativa
- Nota finale
Comandi di pulizia iniziali
clear all, close all
Definizione del sistema e calcolo del guadagno stazionario
s=tf('s');
F=5*(s+20)/(s*(s^2+2.5*s+2)*(s^2+15*s+100));
KF=dcgain(s*F)
Kr=2;
KF =
0.5000
Analisi delle specifiche
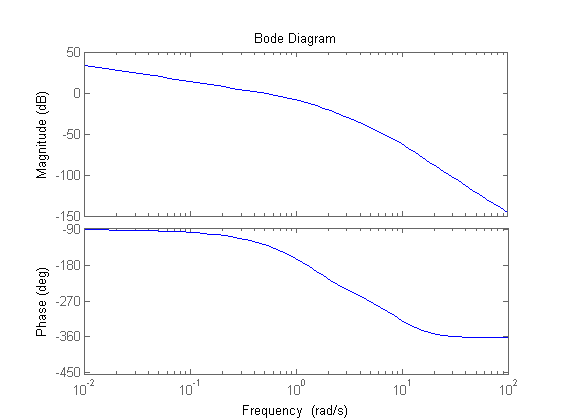
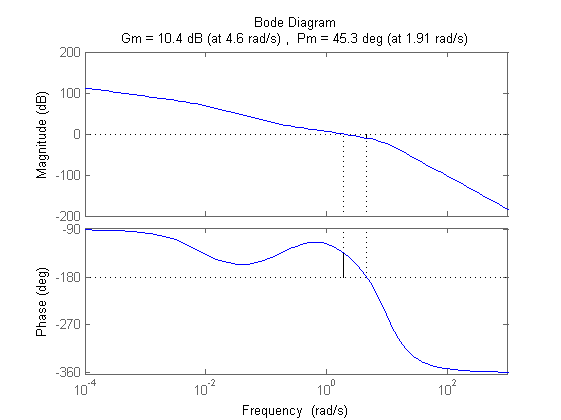
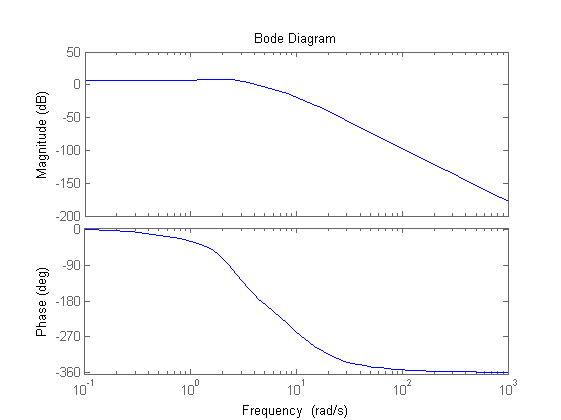
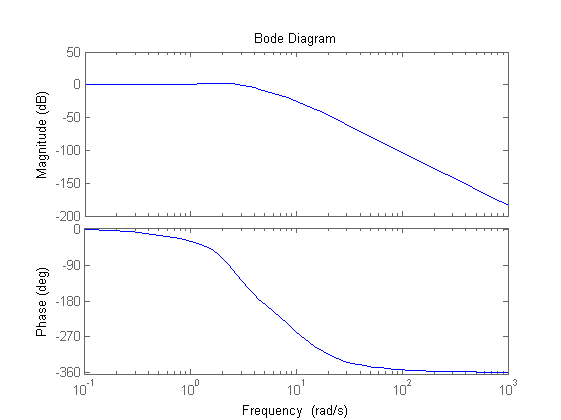
% specifica a) => % 1) non richiede inserimento di poli nell'origine (ce n'e' gia' uno in F(s)) % 2) |Kr/KGa| <= 0.05 => |Kc| >= 20*Kr^2/|KF| => |Kc| >= 160 % specifica b) => % 1) non richiede inserimento di poli nell'origine (il disturbo è costante) % 2) |d/(Kc/Kr)|<= 0.02 => |Kr/Kc|<=0.02 => |Kc|>=100 % segno di Kc positivo: il sistema è a stabilità regolare bode(F) % specifica c) => ts = 1s => B3 ~=3/ts =3 => % wc < B3 < 2*wc => wc ~= 0.63*B3 wc_des=1.9 % specifica d) => s_hat=0.3 => Mr <= 1.44, Mr_dB=3.2dB % (su Nichols) margine_di_fase >= 40deg => meglio 45deg
wc_des =
1.9000
Funzione d'anello di partenza e valutazione azioni da intraprendere
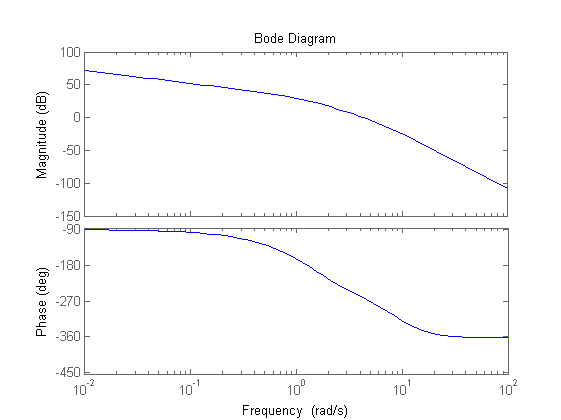
Kc=160 % minimo valore ammissibile Ga1=Kc*F/Kr figure, bode(Ga1) [m_wc_des,f_wc_des]=bode(Ga1,wc_des) % In wc_des il modulo vale circa 18.5 dB e la fase -209.8 deg % Risulta necessario recuperare circa 80 deg prevedendo di dover inserire % anche una rete attenuatrice per ridurre il modulo. % Il recupero della fase dovrà essere ottenuto usando due reti derivative.
Kc =
160
Ga1 =
800 s + 16000
------------------------------------------
2 s^5 + 35 s^4 + 279 s^3 + 560 s^2 + 400 s
Continuous-time transfer function.
m_wc_des =
8.3897
f_wc_des =
-209.7687
Progetto delle reti di compensazione
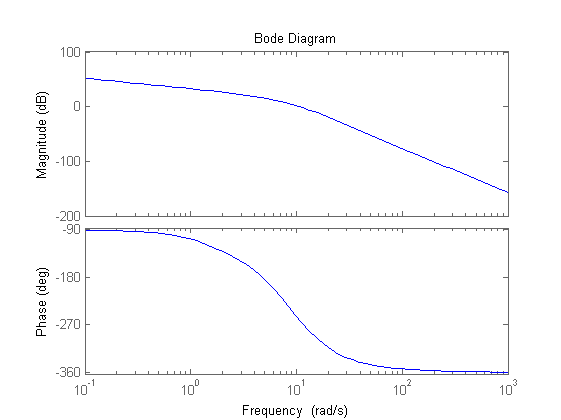
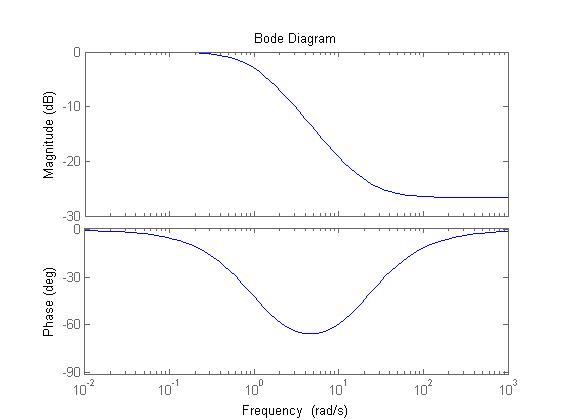
% Inserimento di due reti derivative uguali da 6 per recuperare 80deg in w=wc_des, % progettate sul fronte di salita del recupero di fase in xd = 1.3 per limitare l'aumento di modulo % ed evitare la successiva necessità di una rete attenuatrice molto forte m_a=6 xd=1.3 tau_a=xd/wc_des Rd=(1+s*tau_a)/(1+s*tau_a/m_a) [m1_wc_des,f1_wc_des]=bode(Rd^2*Ga1,wc_des) figure, bode(Rd^2*Ga1) % Inserimento di una rete integrativa con m_i=m1_wc_des ~= 21.5 per avere wc_finale=wc_des % e progettata in xi=230 per perdere circa 5 gradi di fase in w=wc_des % (vedere i diagrammi di Bode normalizzati della rete tracciati in Matlab) m_i=21.5 figure,bode((1+s/m_i)/(1+s)) xi=230 tau_i=xi/wc_des Ri=(1+s*tau_i/m_i)/(1+s*tau_i)
m_a =
6
xd =
1.3000
tau_a =
0.6842
Rd =
4.105 s + 6
------------
0.6842 s + 6
Continuous-time transfer function.
m1_wc_des =
21.5564
f1_wc_des =
-129.3561
m_i =
21.5000
xi =
230
tau_i =
121.0526
Ri =
121.1 s + 21.5
--------------
2603 s + 21.5
Continuous-time transfer function.
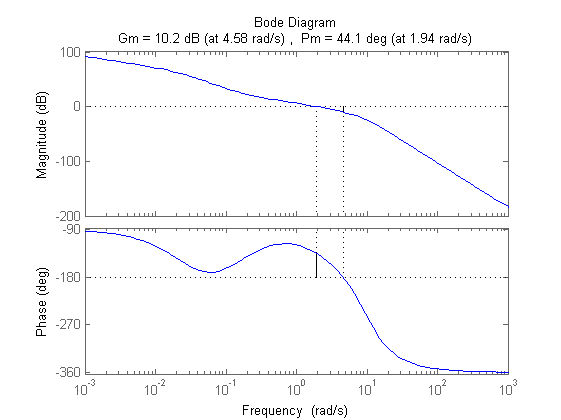
Verifica del soddisfacimento dei requisiti su Ga e definizione del controllore
figure, margin(Rd^2*Ri*Ga1) C=Kc*Rd^2*Ri Ga=C*F/Kr;
C =
3.264e05 s^3 + 1.012e06 s^2 + 8.667e05 s + 123840
-------------------------------------------------
1218 s^3 + 2.138e04 s^2 + 9.387e04 s + 774
Continuous-time transfer function.
Verifica delle specifiche in catena chiusa
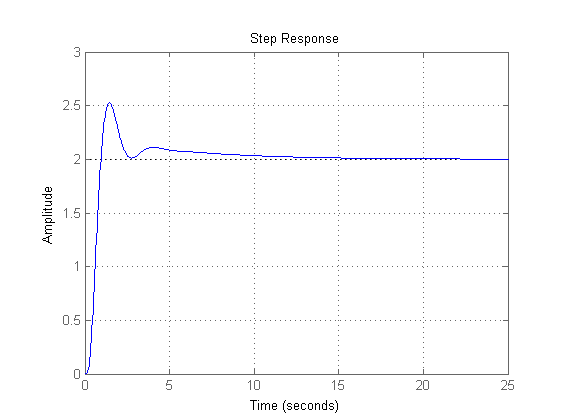
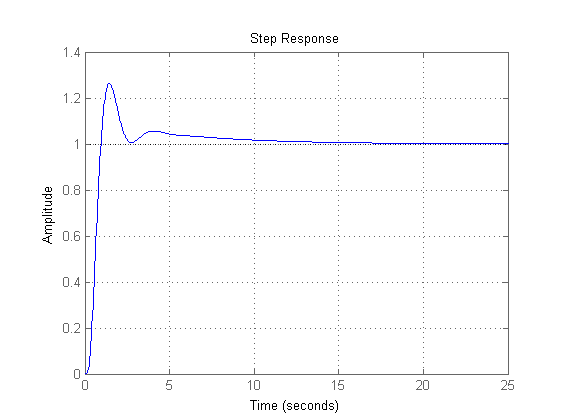
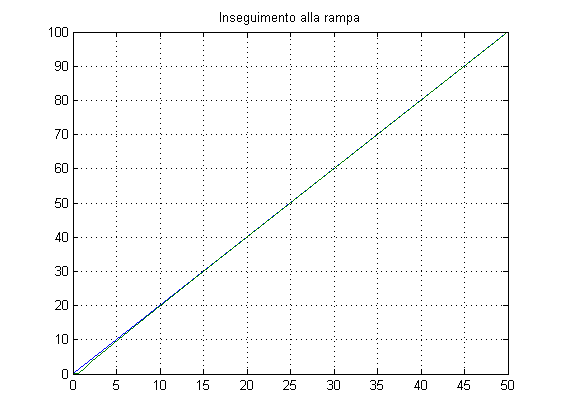
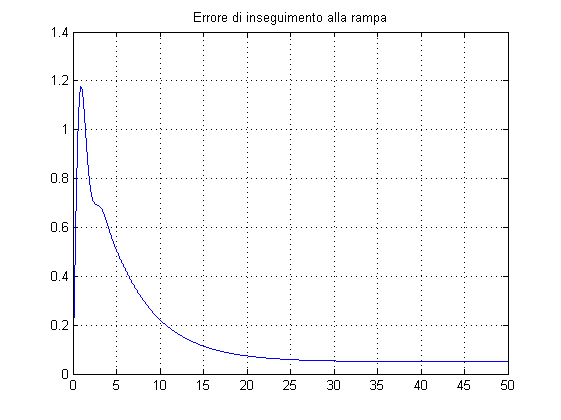
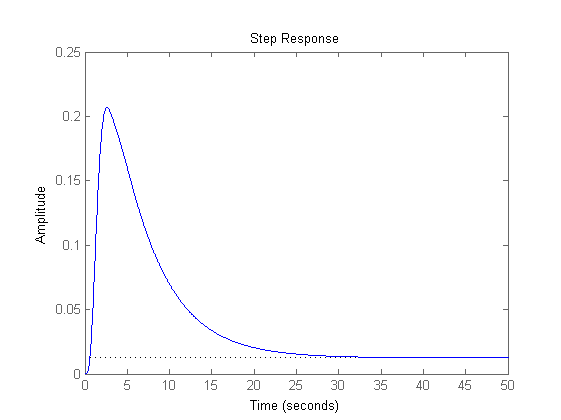
W=feedback(C*F,1/Kr); % Verifica delle specifiche sulla risposta al gradino t_s e s_hat % La divisione per Kr permette di valutare direttamente s_hat=0.263 dal % valore massimo; il tempo salita risulta pari a 0.94 s % (confrontare il risultato dai due grafici!) figure, step(W), grid on figure, step(W/Kr), grid on % Verifica dell'errore di inseguimento alla rampa % (si ottiene errore = 0.05 in regime permanente) t=0:0.01:50; r=t'; y_rampa=lsim(W,r,t); figure, plot(t,Kr*r,t,y_rampa), title('Inseguimento alla rampa'), grid on figure, plot(t,Kr*r-y_rampa), title('Errore di inseguimento alla rampa'), grid on % Verifica dell'effetto del disturbo in regime permanente (pari a 0.0125) Wd=feedback(F,1/Kr*C); figure, step(Wd,50)
Valutazione delle prestazioni in catena chiusa
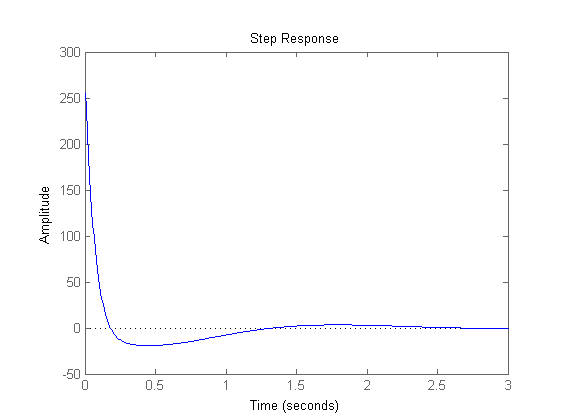
% Attività sul comando: % confrontare il valore iniziale del grafico con quanto ricavabile dal % teorema del valore iniziale; si ottiene u(o)=Kc*m_a^2/m_i = 267.9... Wu=feedback(C,F/Kr); figure,step(Wu) % Valutazione banda passante e picco di risonanza % La divisione per Kr permette di valutare direttamente B3 e Mr % Confrontare i risultati dai due grafici: Mr=2.3 dB, B3=3.65 rad/s figure,bode(W) figure, bode(W/Kr)
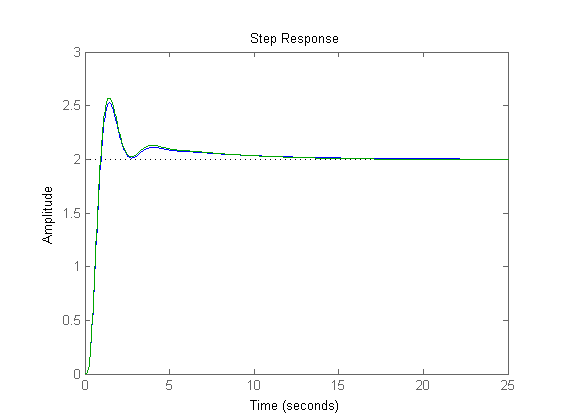
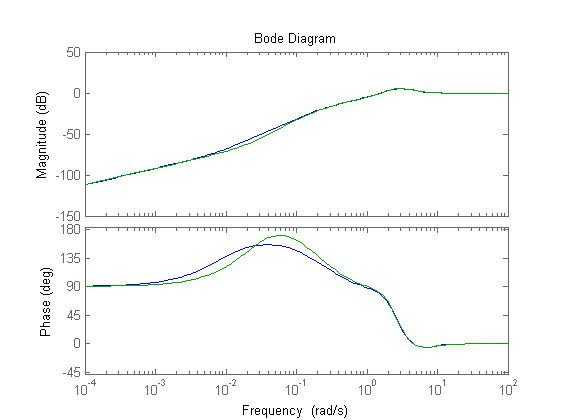
Confronto con una soluzione alternativa
% Soluzione alternativa: reti derivative invariate, utilizzo di 2 attenuatrici meno forti % da 4.6 progettate in xi_alt = 70 m_i_alt=4.6 xi_alt=70 tau_i_alt=xi_alt/wc_des Ri_alt=(1+s*tau_i_alt/m_i_alt)/(1+s*tau_i_alt) C_alt=Kc*Rd^2*Ri_alt^2; Ga_alt=C_alt*F/Kr; figure,margin(Ga_alt) % Confronti ad anello chiuso delle due soluzioni: % la prima soluzione è complessivamente migliore perché % (1) corrisponde ad un controllore di ordine minore (ho usato una rete in meno) % (2) presenta un effetto coda leggermente ridotto (grafico blu) % la seconda soluzione ha come unico vantaggio una sensibilità ridotta % per w comprese fra 0.007 e 0.1 Sens=feedback(1,Ga); % sensibilità per la soluzione originale W_alt=feedback(C_alt*F,1/Kr); figure,step(W) hold step(W_alt) hold off Sens_alt=feedback(1,Ga_alt); figure,bode(Sens) hold bode(Sens_alt) hold off
m_i_alt =
4.6000
xi_alt =
70
tau_i_alt =
36.8421
Ri_alt =
36.84 s + 4.6
-------------
169.5 s + 4.6
Continuous-time transfer function.
Current plot held
Current plot held
Nota finale
% In questa soluzione proposta tutte le simulazioni sono state eseguite % utilizzando soltanto Matlab al fine di avere un unico file di tutte le parti. % Gli studenti sono invitati a costruire il corrispondente schema Simulink % ed a svolgere con esso le verifiche delle specifiche e le valutazioni % richieste in catena chiusa.