
 Levitatore magnetico
Levitatore magnetico
W.I.P. Esperienze proponibili agli studenti:
- Modellistica
- Identificazione
- Controllo
- Filmato lungo:
- Filmato breve:
- Documento pdf:
Descrizione
Il progetto del processo di levitazione magnetica è stato realizzato interamente dai tecnici del
laboratorio LADISPE.L'apparato è completamente autonomo poiché dispone di una comune
connessione alla rete elettrica a 220V 50Hz. Uno stadio di trasformazione fornisce al sistema le
alimentazioni necessarie per i vari blocchi funzionali. Nonostante la presenza di questo blocco di
interfacciamento alla rete elettrica, l'intero apparato possiede ancora la caratteristica di
compattezza ed un peso tale da renderlo facilmente maneggiabile e trasportabile.
L'impianto e' costituito da un magnete a nucleo ferromagnetico [1] la cui induzione e' regolata
dalla corrente che scorre all'interno dell'avvolgimento del magnete stesso. Il corpo oggetto della
levitazione e'una sfera metallica cava che, interagendo con il flusso generato dal magnete, viene
attratta verso di esso vincendo l'azione gravitazionale. Le dimensioni di tale sfera sono: 6
centimetri di diametro per circa 20 grammi di peso. La grandezza disponibile come uscita
dell'impianto e' la posizione verticale della sfera.
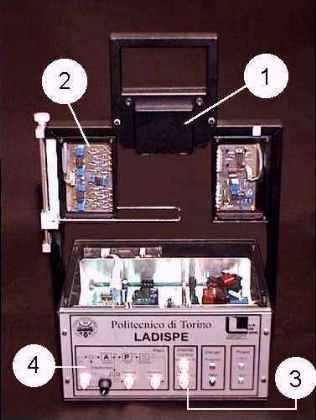
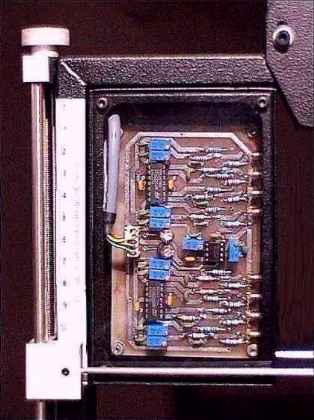
Il sistema di rilevamento di tale posizione [2] è stato realizzato tramite sensori ottici (fotodiodi accoppiati a dei fototransistor), che vengono in parte oscurati dalla sfera al variare della sua posizione. Un opportuno circuito condizionatore pesa i segnali della schiera di fototransistor. L'escursione consentita alla traslazione della sfera è di circa 10 centimetri. L'attuatore, un amplificatore di potenza transconduttivo (ingresso in tensione e uscita in corrente), è di tipo PWM realizzato in una configurazione a mezzo ponte H; tale ponte ha come switch due dispositivi MOS di potenza pilotati, con tecnica a semplice modulante, da un opportuno stadio di comando implementato su scheda.Il processo rende disponibile all'utente un controllo analogico realizzato su una scheda interna che consente di chiudere un anello di reazione senza dover disporre di un compensatore esterno. Sul pannello del sistema si hanno due boccole relative a questo compensatore [3]: una in cui inserire il segnale di riferimento da far inseguire al corpo sospeso ed una da cui prelevare il segnale di comando sintetizzato dal controllore analogico.
Sul pannello frontale è anche disponibile [4] un ingresso di comando per l'impianto.

Si hanno a disposizione:
- boccola di comando : consente di fornire il segnale che pilota l'attuatore;
- potenziometro di offset: agisce anch'esso da comando ma in catena aperta, consentendo di fornire un offset al segnale precedente;
- boccola di corrente : è possibile prelevare un segnale in tensione proporzionale alla corrente che scorre all'interno dell'avvolgimento del magnete. Il sensore utilizzato è ad effetto hall. Questa grandezza può essere utile soprattutto in fase di identificazione dei parametri del processo;
- boccola di posizione : permette di prelevare il segnale di posizione, elaborato dai sensori ottici, per utilizzarlo come grandezza di reazione nella realizzazione del controllo.

Una possibile esperienza da effettuare con questo tipo di processo consiste nel progettare un controllo che permetta il posizionamento della sfera in un punto qualsiasi del suo campo di variabilità. In genere le esperienze di laboratorio realizzate presso il LADISPE si articolano in due fasi: una prima di identificazione del processo ed una seconda di progetto del controllo digitale secondo diverse tecniche. Nella svolgimento di esse si utilizza Matlab come strumento di sintesi del controllo mentre è possibile utilizzare:
-
MatDSP come interfaccia software tra Matlab e una scheda DSP che realizza il controllo
del processo; - Real Time Toolbox come interfaccia software tra Matlab e una scheda I/O.